Raspberry Pi 3 B+
Raspberry Pi 3 +Bを使ってルービックキューブソルバーロボットの製作
回路を製作し、3Dプリンターで各パーツを出力してロボットを組み立てます。
詳細は、以下の「How_to_make]を参照してください。

使用した部品
使用した部品は、Aliexpress、Amazon、スイッチサイエンス、秋月電子通商等で購入しました。
1.Servo TD-8325MG (180deg 25Kg metal) and metal arm "25T" 2個 (Aliexpress)

2.Raspberry Pi
Pi Zero 2Wが購入できなかったため、今回は手持ちのRaspberry Pi 3 B+を使用します


Pi Zero2を購入出来次第、切り替えて使用できるように接続ボード(後述)を作成しました。
3.PiCamera V1.3 1個 & ケーブル:30cm cable Raspberry Pi Camera 1本(Amazon)

4.128x160 Pixels Display(1.77 inch) SPI TFT with ST7735 driver 1個(Aliexpress)

5.Led module 3W ホワイト 1個(Aliexpress)

6.TTP223 Capacitive Touch Switch button self-locking module 2.5-5.5V 1個(Aliexpress)

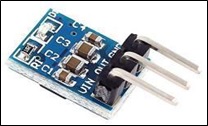
7.降圧モジュールAMS1117-3.3 DC 4.75V-12V to 3.3V Voltage Regulator 1個 (Aliexpress)
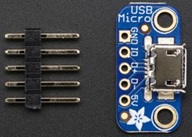
8.USB MICRO-B BREAKOUT BOARD 1個(Aliexpress)
9.その他
・Prototype board
・40pin(2x20) GPIO female header
・8pin(1x8) Female Header
・Male Headers 90deg
・Female Headers
・Capacitor 16V 220μF
10.ネジ類 (ネジの山崎:https://www.ymzcorp.co.jp/ym12/neji_shop.html)
*六角穴付ボルト
・M4X20、1個 ・M3X12、30個 ・M2.5X10 4個 ・M2.5X4 4個
*六角穴付皿ボルト
・M3X12 30個
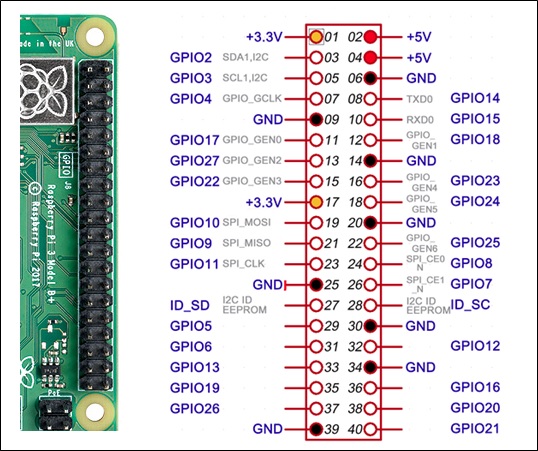
Rasperry pi GPIO pinout
1.Rasperry pi Zero 2 Wのピン配置
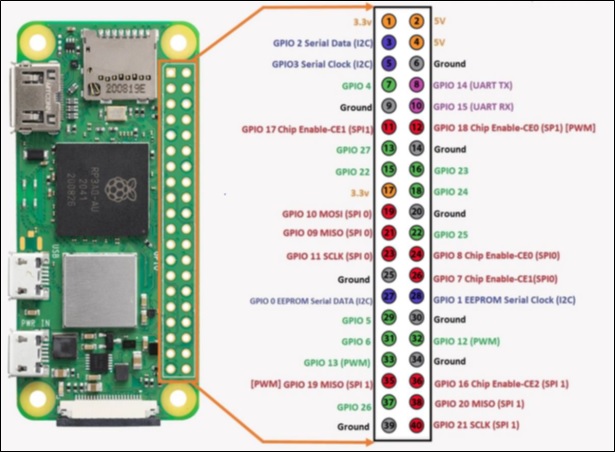
2.Rasperry pi 3 B+ GPIO pinout(ピン配置はZero 2と同じです)
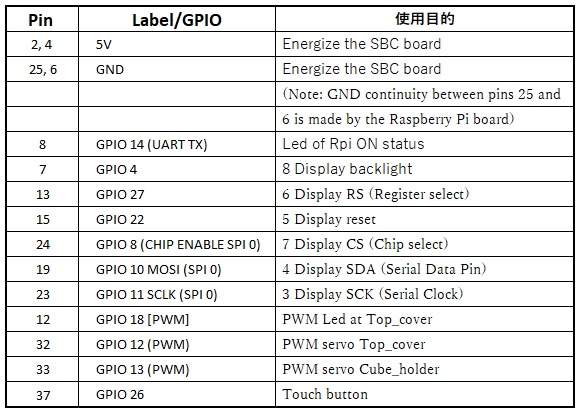
3.使用するPin
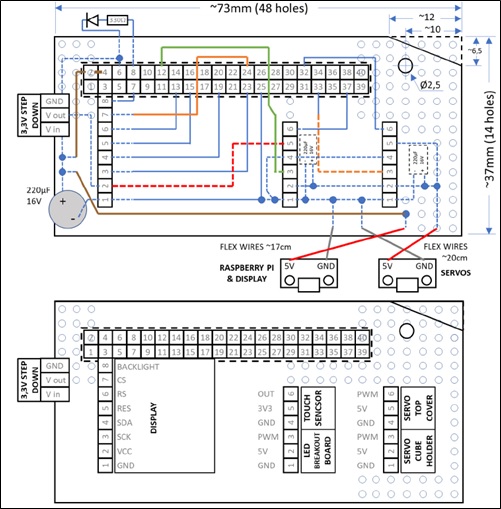
接続ボードの作成
1.両面スルーホール・ユニバーサル基板を図の大きさに切断しました。
・2x20 ヘッダー(Rasperry piと接続ボードを接続するヘッダー)は反対側にあります。
・配線の点線は基板の反対側を示しています。
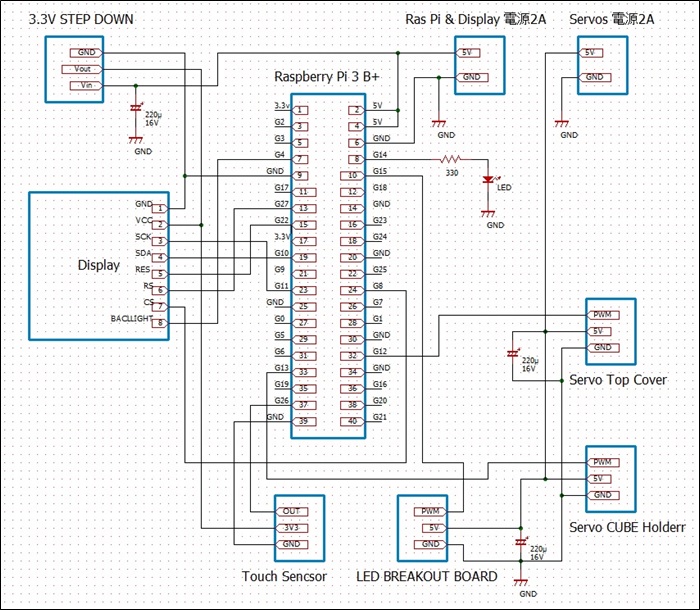
2.回路図
参考として回路図を記載しておきます。
サーボの確認
サーボの回転角度を確認し、サーボを中間位置に設定します。
1.サーボに目印の為にアームを取り付けてください。
2.Rasperry piと接続ボードを接続し、接続ボードにサーボを接続します。
3.サーボの電源をONにして、Rasperry piの電源をONにします。
4.Rasperry piが起動終了後、PCでVNCビューアを起動しRasperry piに接続します。
5,Rasperry piのデスクトップ画面が表示されたら、コマンドライン「LXTerminal」を起動します。
6.プロンプトから次のように入力して、Enterキーを押しフォルダを移動します。
cd cubotino/src
7.続けて、venvをアクティベートするため次のように入力してEnterキーを押します。
source .virtualenvs/bin/activate ( 「スペース+.」に注意)
8.最後に次のように入力して、サーボの180°の位置を確認します。
python Cubotino_T_servos.py -set 1 (スペースのない2つの'-'と1の前のスペースに注意)

(1)(,virtualenvs) pi@cubotino:~/cubotino/src $ の (,virtualenvs)はvenvがアクティブになっていることを表しています。
(2)この状態で、Enterキーを押すと、サーボが180°の位置に動きます。
(3)「-set+スペース」の後の値「-1~1までの浮動小数点値」でサーボが0°から180°まで動きます。
9.操作8の後に続けて、-1 と入力するとサーボが0°の位置に動きます。
サーボが0°から180°まで動いているか確認してください。
10.最後に、0 を入力してサーボを中間位置に設定します。
11.quit() と入力してpython を終了してください。
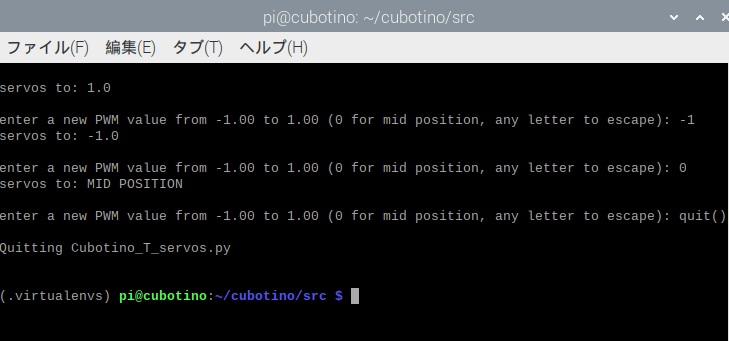
12.「LXTerminal」を終了します。これでサーボの中間位置の設定を終了します。
13.サーボの電源を切ります。(サーボの中間位置が保持されたままです)
14.Rasperry piのイチゴマークをクリックして、「ログアウト」からシャットダウンを選択してください。
ロボットの各パーツを作成し組み立てる
ロボットの各パーツを3Dプリンターでプリントアウトします。
相当の時間がかかります。
1.Rasperry piの「cubotino」ホルダの中にstlファイルが入った「stl」フォルダがあります。
転送ソフト「WinSCP」等のソフトでPCに転送して使ってください。
2.次のホームページからも、直接「stlファイル」をダウンロード出来ます。
https://www.instructables.com/CUBOTino-Autonomous-Small-3D-Printed-Rubiks-Cube-R/?utm_source=newsletter&utm_medium=email
3.各パーツをプリントアウ後、組み立てます。
次の「How_to_make」を参照してください。
(上記ホームページからダウンロード)
この資料に「アセンブリの詳細」が記載されていますので参照してください。省略します。
4.組み立て後、サーボ角度の微調整をします。
piCamera はまだ接続していません。
(1)7月版と8月版では、プログラムを変更しているので方法が違います。
(2)上記「How_to_make」の「23) Tuning:の3. Fine tuning servos angles (changed on 25th July 2022):」に
詳細に記述されていますので参照してください。
(3)以下は、7月版と8月版共に同じ操作です。
①サーボの電源をONにして、Rasperry piの電源をONにします。
②Rasperry piが起動終了後、PCでVNCビューアを起動しRasperry piに接続します。
③Rasperry piのデスクトップ画面が表示されたら、「LXTerminal」を起動します。
④プロンプトから次のように入力して、Enterキーを押しフォルダを移動します。
cd cubotino/src
⑤続けて、venvをアクティベートするため次のように入力してEnterキーを押します。
source .virtualenvs/bin/activate ( 「.」に注意)
(4)この後、7月版と8月版では、方法が違いますので、上記「How_to_make」を参照してください。
(5)最終的に、パラメータファイル「Cubotino_T_settings.txt」を修正します。
ロボットの自動起動等の最終設定
サーボの調整、ロボットの起動等に問題が無ければ、ロボットの自動起動、タッチセンサーによるRasperry piの
シャットダウン機能をセットします。
1.ロボットの自動起動のセット
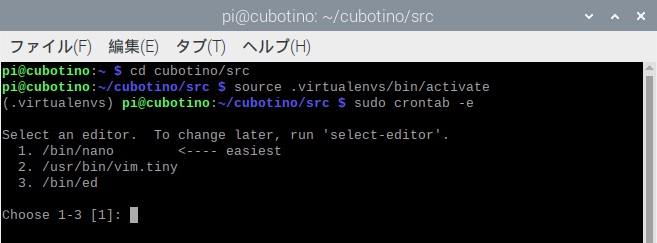
(1)Rasperry piのコマンドライン「LXTerminal」を起動します。
(2)venv(,virtualenvs) pi@cubotino:~/cubotino/src $)からから次のように入力します。
sudo crontab -e
(2)初めてエディタを選択する時(Choose 1-3[1]:と選択を求められたとき)は、nano に「1」を選択します。
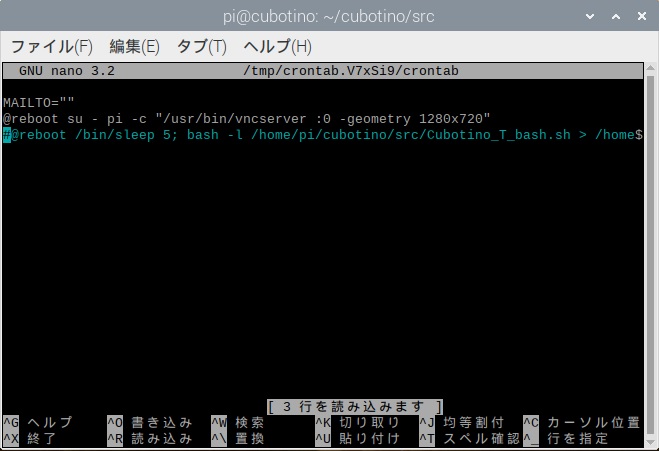
(3)crontab が表示されたら、最後の行「#@reboot /bin/sleep 5;……….」のコメントを解除します。
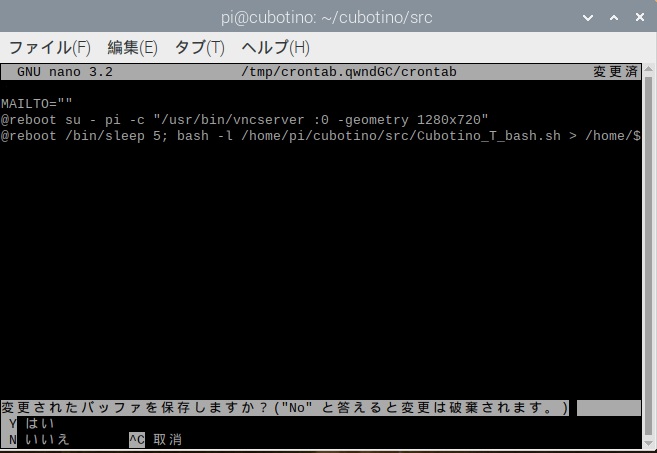
①「#」を削除し、終了「Ctrl+x」を押します。
②保存を聞かれるので、「y」キーを押して保存します
2.タッチボタンによるシャットダウンの設定
(1)続けて、プロンプトから次のように入力します。
sudo nano Cubotino_T_bash.sh
(2)最後の行、「#halt -p 」のコメントを解除します。
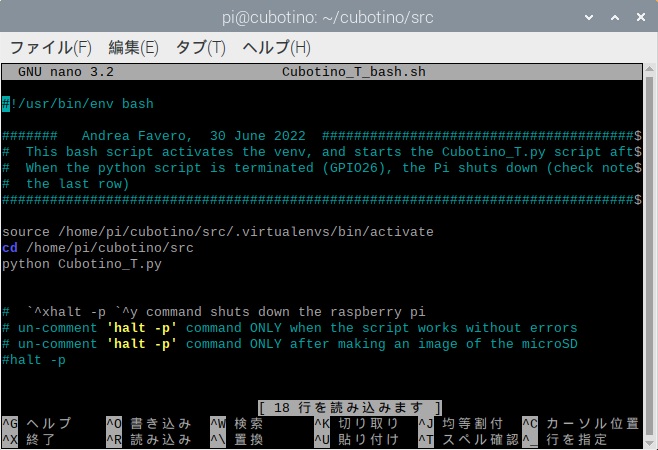
(3)「#」を削除し、終了「Ctrl+x」を押して、yキーで保存してください。
以上で設定終了です。